
■ ロボティクス
工作機械用パラレルメカニズムの開発
|
パラレルメカニズムは高剛性・高精度・高速性能の観点から工作機械への応用が期待されている.
しかし,作業領域が狭いことや入出力関係が非線形であることなどの欠点から従来の軸加工機と同等の実用化には未だ至っていない.
本研究では工作機械用パラレルメカニズムの開発と高精度キャリブレーション法について提案している. 右図は本研究室において開発した工作機械用パラレルメカニズムである. この機構は,静止節と回転1自由度待遇で固定された3本の節によって出力節を支持している. 支持節と出力節は並進1自由度対偶と球面3自由度対偶によって連結され,3本の支持節を独立して並進させることによって,出力節中央に固定された工具を用いた加工が可能である. |

|
ウィスカ型触覚センサの研究
|
近年,人間に近い機能を持ったロボットの姿を見かける機会が多くなっている.
ロボットに五感を有する研究も進められているが,触覚に関する研究は,視覚・聴覚等の感覚に比べ遅れている. 本研究では,人間の体毛をモチーフとしたウィスカ型触覚センサを提案している. 同センサをヒューマノイドロボット皮膚として用いることを想定し,形状認識や質感認識が可能なセンサの開発を行っている. |
|
柔軟マニュピレータの開発
|
生産ラインの自動化に伴って,バリ取りや研磨,配管の検査などにおいてロボットの導入が強く望まれている.
しかし,従来のロボットの多くが剛性の高いアームで構成され,柔軟な作業や曲がりくねった配管等への進入に適していないためこれらの作業のロボット化は実現されていない. 本研究ではバネ鋼を用いた柔軟マニュピレータを開発し,制御方法についても提案している. |

|
身体機能測定用ワイヤパラレルメカニズムの研究
|
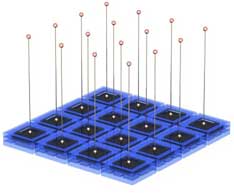
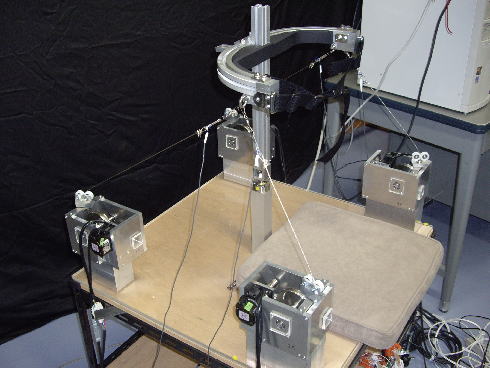
本研究の目的は,高齢者や障害者の身体能力の評価として,姿勢の調整および保持能力を評価する評価装置の開発である.
高齢者や障害者にとって,身体能力を測定し評価することは重要であり,この評価によって,転倒などの事故防止,
日常生活へ及ぼす支障の度合いの評価,また,支障の度合いに応じて,それぞれの人に適する処置を行うことが可能となる. 測定装置には,高剛性,多自由度,軽量,小型,柔軟性を有するワイヤパラレルメカニズムを利用している. 測定用のワイヤパラレル装置は,4個のモータで被験者の上体を支えるワイヤを巻き取り,それぞれのワイヤの長さを調節することで上体の位置制御を行う. 被験者の姿勢変化時に得られるワイヤの張力を測定することで姿勢の調整および保持能力の評価が可能となる. |
|
スキルアシストハンドの研究
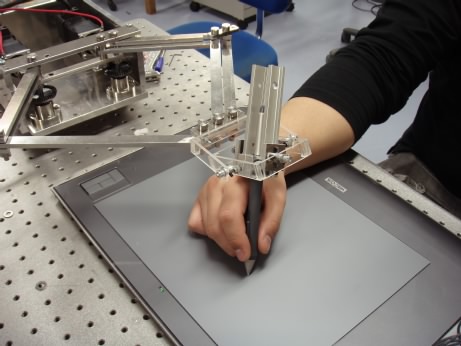
| 生産工程における研磨や,医療現場における生体組織の取り扱いには指肢に精密な動作を必要とするが,人間の能力には限界があり,その習得には長時間の学習と経験を必要とする. そこで本研究では,精密な位置決め制御を得意とするロボットの能力と,人間の感覚や判断力を協調することでロボットに人間のスキルを補助させることを目標としている. このようなスキルアシスト研究の初期段階として,人間がペンを用いて図形を描く際の動作の補助を目標とし,図に示すようなスキルアシストハンド試作機を開発した. これによりロボットによる人間へのスキルアシストの実現性を確認した. |
|